Vstupní soubory do programu jsou dva textové soubory. Soubor snímkových souřadnic na Obr. 2 (Číslo bodu, x, y, počet pixelů), který si uživatel má možnost načíst v menu soubor, viz. Obr. 3. Kde: x,y jsou snímkové souřadnice v pixelech a X, Y, Z jsou prostorové souřadnice v metrech.
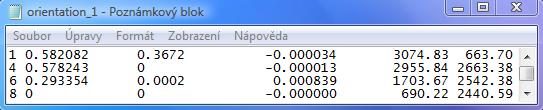
Obr. 2 – Vlícovací body
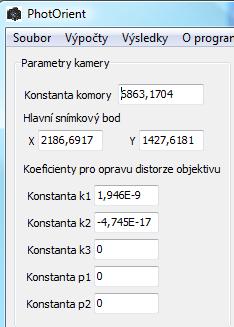
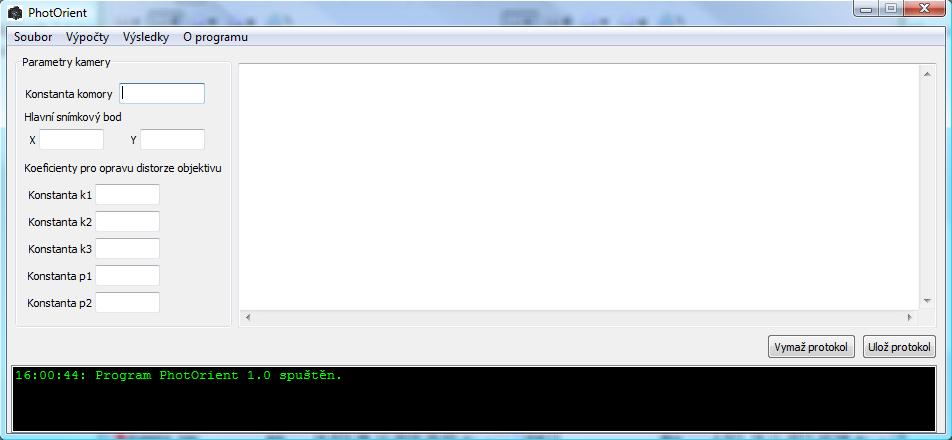
Obr. 4 – Vnitřní orientace
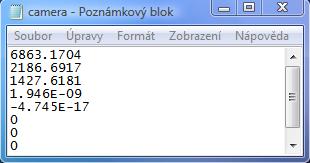
Obr. 5 – Vnitřní orientace kamery v souboru
Poznámka: Pro správný chod celého programu je nutná správná orientace vlícovacích bodů v prostoru, aby nedošlo k chybnému výpočtu úhlů stočení ve výpočtu vnější orientace. Vlícovací body musejí být v matematickém systému dle Obr. 6.
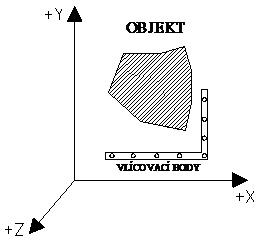
Obr. 6 – Souřadný systém vlícovacích bodů
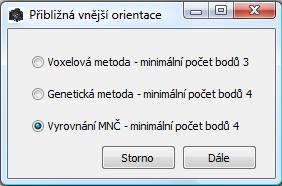
Výpočty lze provádět stiskem na příslušný název výpočtu v menu. Na výběr je zde výpočet opravy opravy distorze objektivu snímkových souřadnic vlícovacích bodů. Druhá možnost je výpočet přibližných prvků vnější orientace z minimálního počtu vlícovacích bodů. Metody výpočtu lze vidět na Obr. 7. Voxelová metoda je založena na rozdělení pracovního prostoru do jednotlivých krychlí. Následným zmenšováním těchto krychlí je pak dosaženo příslušné polohy vstupní pupily. Na tento výpočet stačí pouze tři vlícovací body a výsledkem metody jsou celkem 4 řešení (2 v dané polorovině). Genetická metoda je založena na využití genetického algoritmu, kdy je poloha vstupní pupily odhadována z náhodného vektoru. Pro tuto metodu je nutné znát 4 vlícovací body a výsledkem jsou dvě řešení (1 v dané polorovině). Poslední metodou je vyrovnání pětistěnu tvořeného vstupní pupilou a čtyřmi vlícovacími body metodou nejmenších čtverců. Je teda nutné znát 4 vlícovací body a výsledkem jsou obecně dvě řešení (1 v dané polorovině). Ovšem pro tuto metodu je zvoleno pouze řešení, které geometricky odpovídá i úhlům stočení snímku. Celý proces výpočtů je vytvořen sadou postupných oken, ve kterých lze nastavit parametry nastavení výpočetních algoritmů. Kompletní dokumentaci k uvedeným postupům lze nalézt zde: genetic+voxel, MNČ.