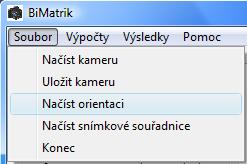
Vstupní soubory do programu BiMatrik 2.1 jsou podobné jako u předchozí verze. Jedná se o soubory snímkových souřadnic virtuálních značek na Obr. 2 (Číslo bodu, x, y, počet pixelů) a soubory vlícovacích bodů na Obr. 3 (Číslo bodu, X, Y, Z, x, y), které si uživatel má možnost načíst v menu soubor, viz. Obr. 4. Kde: x,y jsou snímkové souřadnice v pixelech a X, Y, Z jsou prostorové souřadnice v metrech.
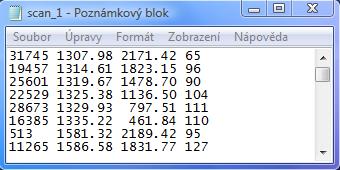
Obr. 2 – Snímkové
souřadnice
Obr. 3 – Vlícovací body
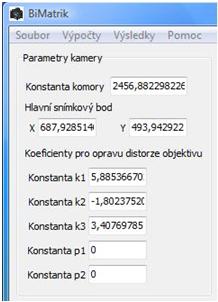
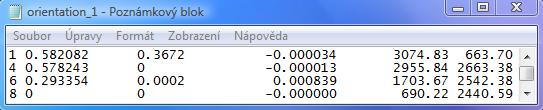
Obr. 5 – Vnitřní orientace
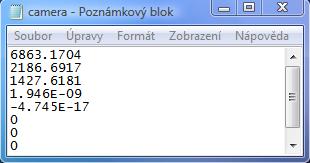
Obr. 6 – Vnitřní orientace kamery v souboru
Poznámka: Pro správný chod celého programu je nutná správná orientace vlícovacích bodů v prostoru, aby nedošlo k chybnému výpočtu úhlů stočení ve výpočtu vnější orientace. Vlícovací body musejí být v matematickém systému dle Obr. 7.
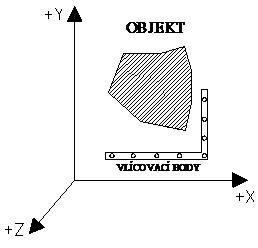
Obr. 7 – Souřadný systém vlícovacích bodů
Nastavení výpočtů
Veškeré výpočty v programu jsou dostupné v menu Výpočty včetně podrobného nastavení viz. Obr. 8.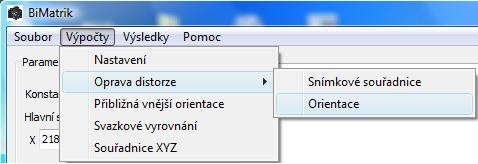
Obr. 8 – Menu výpočty
Pokud nejsou správně načteny všechny potřebné soubory k daným výpočtům, nelze v menu výpočty spustit (výpočty jsou šedě).
Před výpočetním procesem je vhodné zkontrolovat nastavení vlastností výpočtu, které lze pustit vždy a je ve výpočetním menu na prvním místě viz. Obr. 9.
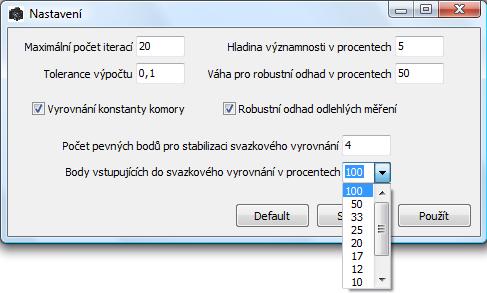
Obr. 9 – Nastavení výpočtů
Maximální počet iterací je hodnota, kdy skončí iterační procesy v programu, bez ohledu na konvergenci. Tolerance výpočtu slouží k posouzení konvergence iteračního procesu, kdy se porovnávají dvě po sobě jdoucí směrodatné odchylky jednotkové. Pro ukončení iteračního procesu musí být tento rozdíl menší, než je hodnota uvedená v nastavení. Hladina významnosti je pro závěrečné testovaní pomocí Fisherova rozdělení. Váha pro robustní odhad odlehlých měření je hodnota, která je hraniční pro vyřazení měření ze souboru dat pro vnější orientaci. Pokud je váha z odhadu menší než hraniční hodnota, je měření vyřazeno. Dále lze provádět vyrovnání vnější orientace s konstantou komory a lze provádět robustní odhad odlehlých měření, které lze zaškrtnout nebo nechat nezaškrtnuté, pokud není vhodné tyto kroky provádět. Počet pevných bodů pro stabilizaci, slouží k stabilizaci výpočtu vnější orientace a minimální počet je 3. Poslední možností pro uživatele je možnost omezit počet virtuálních bodů, které vstupují do výpočtu vnější orientace, aby nebyl výpočet zbytečně náročný. Standardně nastavené hodnoty jsou stejné jako na Obr. 9 s počtem bodů vstupujících do svazkového vyrovnání 50 procent.
Nastavení lze změnit pouhým přepsáním hodnot v rámečcích a zmáčknutím tlačítka „použít“. Tlačítko „default“ přepíše hodnoty v nastavení na původní hodnoty, při puštění programu. Tlačítko „storno“ slouží k ukončení okna, bez uložení nového nastavení.
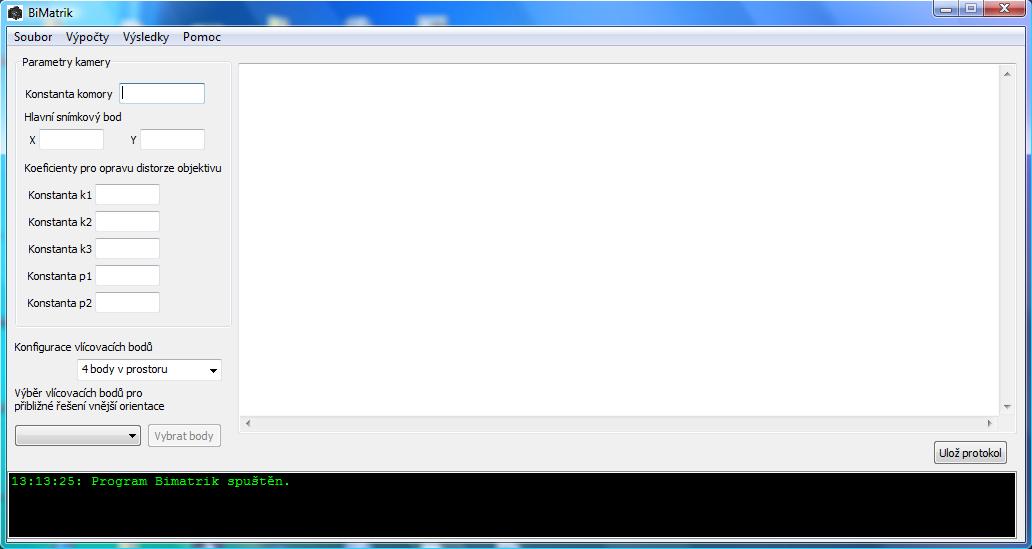
Pro výpočty přibližné vnější orientace lze zadat další nastavení, které se nachází v hlavním okně programu viz. Obr. 10.
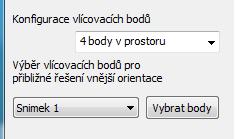
Obr. 10 – Nastavení přibližné orientace
Konfigurace vlícovacích
bodů slouží k výběru přibližného výpočetního postupu vnější orientace. Po
spuštění programu je konfigurace nastavena na „4 body v prostoru“, se kterou
lze počítat i body v rovině. Druhou možností je výpočetní postup pro 4
body v rovině.
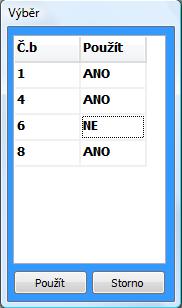
Výběr 4 vlícovacích bodů pro přibližný výpočet lze u každého snímku vybrat na liště, kde se po načtení souborů vlícovacích bodů, zobrazí počet snímků. Tlačítko „Vybrat body“ slouží k výběru použitelných bodů na snímku viz. Obr. 11. Pokud je zadán jiný počet bodů než 4, program zobrazí chybovou hlášku a použije první 4 body na snímku. Výběr se provádí kliknutím na slovo „ANO“ nebo „NE“, které se přepínají. Po dokončení zadání je nutné stisknout tlačítko „ Použít“.
Výpočty lze provádět stiskem na příslušný název výpočtu v menu. Veškeré výpočty jsou vázány na výpočty předchozí, což znamená, že při posledním výpočtu (umístěn nejníže) program provede všechny výpočty které jsou v menu výše položené. Tento výpočetní systém byl zvolen pro lepší kontrolu nad výpočty. Je tedy možné postupně kontrolovat stabilitu dílčích výpočtů. Po úspěšném provedení daného výpočtu se zobrazí ve spodní části hlavního okna zpráva (Obr. 12) , že výpočet byl úspěšně či neúspěšně proveden. Dále se zde zobrazují další informace o chodu programu. Pokud byl daný výpočet úspěšný, odblokuje se příslušná nabídka protokolu o výpočtu.

Obr. 12 – Okno
zpráv
Výpočty jsou členěny do 4 logických částí. V první části „Oprava distorze“ lze opravovat snímkové souřadnice o distorze objektivu. Druhá část „Přibližná vnější orientace“ slouží k výpočtu hodnot vnější orientace a prostorových souřadnic virtuálních značek z vlícovacích bodů pro každý snímek zvlášť. Ve třetí části „Svazkové vyrovnání“ je provedeno vyrovnání, které zahrnuje do výpočtů všechny snímky najednou a při kterém je testováno, zda se v souboru nenacházejí odlehlá měření. V posledním části „Souřadnice XYZ“ se počítají prostorové souřadnice všech virtuálních značek a provádí se testování, zda výsledná virtuální značka splňuje Fisherův test.
Výsledky
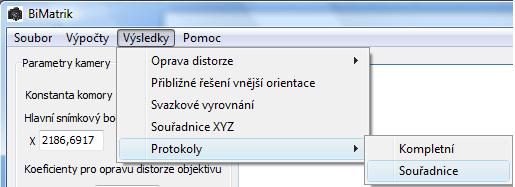
Protokoly o výpočtech jsou v menu výsledky viz. Obr. 13.
Obr. 13 – Menu
výsledky
Některé z protokolů jsou vzhledem ke své velikosti rovnou přesměrovány do textového souboru, který si uživatel sám pojmenuje a umístí. Jedná se o „Oprava distorze“, „Souřadnice XYZ“ a „Protokoly“. Výsledné hodnoty včetně rozborů přesnosti se zobrazí přímo v hlavní aplikaci u „Přibližné řešení vnější orientace“ a „Svazkové vyrovnání“. I tyto protokoly lze uložit použitím tlačítka „Ulož protokol“ v hlavním okně programu. Komplexní přehled o řešení dané úlohy je v protokolu „Kompletní“ , kde jsou podrobně uvedeny veškeré prováděné operace včetně rozborů přesnosti. Protokol „Souřadnice“ je soubor výsledných souřadnic virtuálních značek, které jsou připraveny na import do CAD programů.